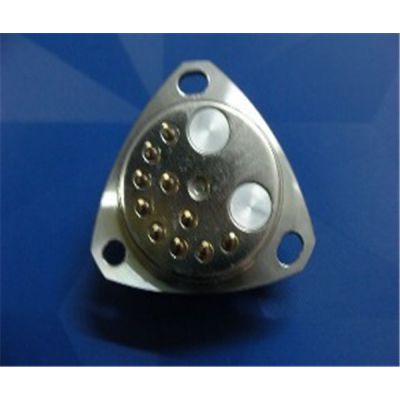
加速度引起的差动电容变化量C,由伺服电路中差动电容检测器检测,石英加速度计用途,其输出为电流,此电流经电流积分器变成输出电压,然后跨导补偿放大器把电压变成输出电流,该输出电流的大小与输入加速度成正比。极性取决于输入加速度的方向。廊坊市航新仪器仪表有限公司专业开发生产各类专用设备并自主研发了石英挠性加速度计产品。石英挠性加速度计是一种力平衡式传感器,它将输入加速度转换成其挠性摆片的微小位移,并用反馈力加以平衡。由于采用了力反馈回路,使这种挠性加速度计具有精度高,抗干扰能力强的特点。适合于低频低g值的加速度测量,是惯性导航和制导系统中不可缺少的关键器件之一。

态度解决方案是飞行控制的基础和重要部分。估计的姿态将被释放给姿态控制器以控制飞行稳定性,这是飞行稳定性的最重要***。关于姿势计算的基本知识,我不会在这里详细描述,有很多关于此的在线信息。主要是掌握坐标系的概念,几种描述方法的姿态角(欧拉角,四元数,旋转矩阵)。姿态计算的难点主要在于通常用于消费级飞行控制的惯性传感器都是MEMS器件,精度相对较差。同时,陀螺仪,加速度计和地磁仪的单传感器无法获得满意的姿态角信息,因此需要一些融合算法来进行姿态估计。很多人都有这个问题,也就是说,没有办法确定所获角度的准确性。惯性导航的精度在很大程度上取决于组件(主要是陀螺仪)的精度。高精度惯性导航系统最重要的要求是高精度陀螺仪和加速度计。我不知道小范围的高精度是什么。在陀螺仪精度方面,它通常是机械陀螺仪(静电,柔性)>激光>光纤>微机械。简而言之,石英加速度计,最重要的是选择具有合适精度的陀螺仪和加速度计。
目前智能传感器是国际上传感器研究的热点和前沿,国内传感器产业向微型化、集成化发展的主要瓶颈是我国IC与Mems技术产业链能力不足,加速度计,不论是在技术素质、生产能力还是在生产规模方面与***技术相比差距都比较大。大力开展智能传感器研究是我国应采取的跨越式的发展思路,是占领未来信息技术制高点的战略的关键措施,也是为了传感器发展的趋势。通俗点讲就是,加速度计是用来测量重力矢量的,那么我把测量的机体坐标系的加速度转换到参考坐标系去和当地的重力矢量比较,差别不就是我转换矩阵(DCM,石英绕行加速度计,即姿态)的误差么?同理磁强计是用来测量地磁矢量的,也可以用同样的方法获得姿态的误差。利用这个思想再稍加处理,就是现在应用广泛的Mahony互补滤波器。